Morphogenetic CA
69’ 40’ 33 north
Centre
for Evolutionary Computing in Architecture (CECA)
AVA,
UeL London
Christian Derix MSc, Corinna Simon MSc
Director Paul Coates AA Dipl
GA 2003, Milan
1 >
abstract
We would like to present some recent work using cellular automata and agent modelling for the generative design of building configurations. The cellular automata is based on a 3d terrain model of a site (taken from the recent Europan competition) which is encoded with both topological and economic data, and agents that are light sensitive and which reconfigure the developing architecture by checking overshadowing and spatial occupation. The emergent pattern of development therefore results from an understanding of the programmatic and the spatial parameters of the task, and is intimately related to the site and its peculiarities.
2 > introduction
2.1 > generative modelling perennial problem:
Bridging the theoretical gap
This project is attempting to take the approach of digital generative design in architecture out of its in vitro academic context into the realm of industry’s design briefs. This undertaking aims at throwing open the limitations of such projects when it comes to the translation into an open design competition. We were anxious to find out when, at which stage of the design process, industry’s constraints would force us to dilute the integrity of the process. We chose this year’s Europan07 brief to set the constraints and to engender a generative approach we would base our design on.
Europan competitions take place every four years, sponsored by the EU, and comprise a series of sites across Europe that are in need of redevelopment.
2.2 > Europan 07: brief & analogy
69’ 40’ 33 north
Tromso in Norway, with its 60.000 inhabitants plus an extra 7000 students, is situated in a Fjord, 200 miles north of the Arctic Circle. It is surrounded by a sprawling rural countryside in a spectacular, pristine and vast arctic landscape. With 2 months of midnight sun in the summer and 2 months of no sun at all during winter, which lasts 7 months the climatic changes are dramatic.

Europan07 –
site of Tromso
The site is an artificial piece of headland reaching into the strait of Tromso. It is delimited by a fjord towards West, a highway and its facilities (a gas station comprising a shop – the main social focus of the suburb) towards East, a creek and forest towards south and housing towards North. The highway towards East separates the existing suburb of Tromso, Kroken, from the site.
The design brief focuses on the development of diverse and innovative housing types for a variety of occupants. This housing should engage with the existing suburb. The surrounding housing consists mainly of post-war development designed without a sustainable approach to the climatic challenges.
One of the salient qualities and uses of arctic coastal regions has traditionally been the exploitation of peat-lands that stem from the setting of a combination of wet soil with remains of tree roots and trunks, into a compost type resource. Rich in carbon, it has been depleted for centuries as fossil-fuel for heating. The process of exploitation foresees the scooping out of this soil in cubic chunks. These cubes are deposited on nearby sites and sold. The deposits were not always entirely carried off and left new deformation in the landscape. Thus, peat has not only been transformed into other resources but also changed landscapes of coastal arctic regions.

peat-resources
in coastal heath land
2.3 > CA & MAS & environment:
‘However, sometimes it is
necessary to study phenomena of such a great complexity, that their
implementation with a single CA seems anyhow complicated or impossible. This is
why it’s useful to apply the concept of multi-cellular automata, which is: a
system constituted by two or more automata linked together in sequence.’[4]
The brief displays a depth of interacting parameters and entities within a complex site over at least two different scales (urban and morphological) that are hard to meet with traditional top-down methodologies prevalent in architectural design. Thus, in order to widen the search and solution space we used a by now well-tested method of decentralized non-linear design, the cellular automaton (CA) coupled with a multi-agent system and environmental parameters.
Each of those autonomous systems has its strengths of application within the architectural scales whose combination we hope produce a solution space more differentiated than a singular use of one or the other.
Customized to the design brief, we believe that the CA can solve the continuity problem present in the context of the competition’s site by diffusing information about the context locally.
Further, the multi-agent system – based on the swarm logic – will serve to communicate the dynamic environmental parameters – sunlight and wind direction – to the CA without having to program them as instructions into the CA. Thus, the swarm tests the fitness of the configurations of the CA in accordance to the environmental parameters.
Finally, we synthesized the interaction of the CA with the swarm to a morphogenetic process. CA so far has either been used as an analytical simulation tool or exclusively as a form-generation tool. The present approach attempts to combine the analytical and the morphogenetic into a continuous method.
3 > Precursors
3.1 > CA as analytical model
The Community land use game CLUG [1] of Cornell University was the precursor of all system models of urban development, using a tiled map and a team of human actors to execute the rules. The eventual transformation of this idea into a computer game - Sim City, illustrates how the development of computers has enabled more and more complex models to be developed.
Nearly all models of urban structure are based on a scale of development that never reaches down to the scale of architecture and architectural spaces, as one might find in a city. One of the major contributions to a generative theory of architectural space was that of Bill Hillier with his Alpha syntax model of space (Hillier & Leaman 1978)[2]. Following on from Steadman’s (Geometry of Environment 1970)[3] exposition of the effect of geometry on configurations – what he likes to talk of as ‘the topological necessities of space’, Hillier explored the morphological outcomes of a set of simple syntaxes – simple grammars of form for developing agglomerations of buildings. The alpha syntax was the simplest, and generated spatial arrangements similar to typical small towns in Europe.
P. Coates – Alpha Syntax study of the
Isle of Dogs
It is possible to dichotomise the debate between the morphologists – who believe that the shape of space (dictated by architectonic and material notions) influences the way it is utilised, and the economist/geographers who say that urban structure is the inevitable outcome of geographical and economic outcomes. While the morphologists are prepared to admit the obvious influence of global factors in locating and encouraging development, the economists are reluctant to concede any reverse feedback from the architectural necessities of settlement.
One example of the way micro morphology may influence global social organisation is that of the guild courtyards often found in pre-Islamic cities of the middle eastern type. In these ancient cities one often finds that culs-de-sac are occupied by single occupations (gold beaters court, leather sellers court etc). The conventional explanation is that these social structures have imposed the morphology on the city, by gathering together and closing off the street to through traffic. By exploring the morphogenetic system of these simple agglomerative cities, it is easy to observe that there is a tendency for all street systems to collapse into culs-de-sac, the one ended street is the natural state of equilibrium as it were. If this is true, then the courtyards are the inevitable topological outcome of the global agglomeration process and the guilds simply ‘occupy’ these pockets of space – or even stronger – they are themselves created by the morphological outcome.
P. Coates – emergence of inner
courtyard
The researches at UCL have been developing a range of CA based models of urban development, mostly at the larger scales mentioned above as normal in the geographic field. The space syntax group (following on from Hillier’s work mentioned above) have also developed models using agents at nearer architectural scales, to analyse emergent properties of urban space such as co-visibility, predictive pedestrian traffic and many other measures.
3.2 > multi-agent models
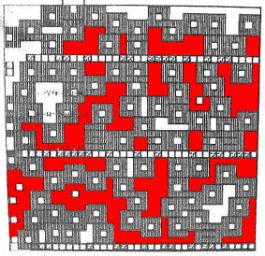
Using agents to analyse and construct urban morphology has been reported [13,15] by the authors. In such systems the agents are provided with means for sampling the existing morphology of an area and either reporting globally, or making interventions. As an example of multi agent analysis, take the case of a simple star-logo model [14], which analyses the spatial configuration of the Hoxton area of East London to predict relative accessibility of streets. A typical ‘top down’ analysis (Hillier etc) maps the street pattern into a network, which is then analysed for accessibility metrics using standard graph theory algorithms. The outcome labels streets (edges in the graph) with respect to their relative accessibility from all other streets. In Miranda’s model however the streets are represented by small tiles, which are labelled as walk-able on or not. Agents are randomly placed onto these tiles and allowed to walk at random, with the only proviso that they must not walk on ‘non street’- tiles. As the agents walk they update the tiles by one point, thus the tiles that have had the most traffic gain the most points. This is reflected in the colour gradient of the outcome. The result is a pattern of usage that is similar to that derived from the network analysis, but of course the method of obtaining it is quite different, in particular it provides a better model than the network version because it makes fewer assumptions about what is going on. In the network model the street pattern is arbitrarily decomposed into straight segments which are arbitrarily connected with identical weight. In the agent model they just walk about – the only assumption in the model is the shape of the space as described by the array of small tiles.
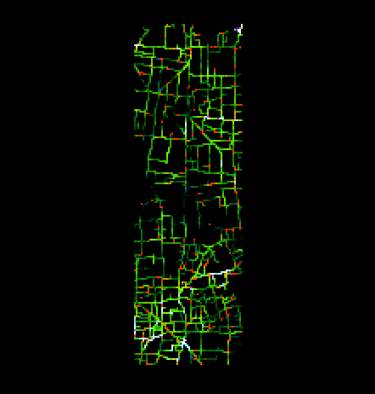
P.Miranda – accessibility study
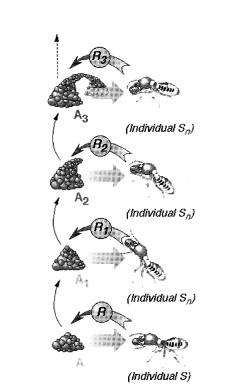
L. Grasse –
stygmergic nest builders in wasps
Guy Theroulaz and Eric Bonabeu [8] were the first to develop models of morphology based on a detailed understanding of the complex relations between morphogenetic ‘builders’ (in their case of wasps nests) and the material they are using. This relation was dubbed ‘stygmergic’ by Louis Grasse in 1956 from stigma = sting: ergon = work. It develops the idea that, while the agents have morphogenetic desires and behaviours, these procedures are triggered and/or modified by the environment in which they are working. Since this environment is the very one they are building there is a feedback loop between the builder and the material of the environment. Stygmery allows for multi-agent systems to communicate indirectly through their environment rather than exercising direct feedback amongst themselves. Models of such behaviour can show complex morphologies, and students at CECA have experimented with termite architectonic models.
Swarming is a multi-agent behavioural phenomenon which is based on direct feedback between the agents. This model is - just like the CA -based on parallel computation and based on flocking behaviour of birds. Thus, information gleaned as perturbations from the context (whatever the context constitutes: the swarm topography itself, the CA (topology, etc) is distributed throughout the system due to local communication only. Unlike the CA however, the swarm is not fixed by topological constraints and has therefore a geometrically unbound search space – the CA constitutes an iso-spatial system, where all points within the spatial array can’t change their relative position within each direction. Thus, swarming generates clusters of hotspots of interaction pointing to ‘interesting’ qualities within the environment.
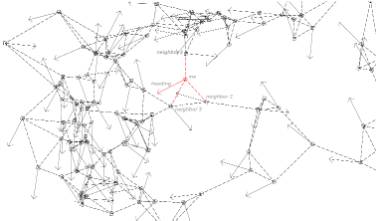 P.Miranda - swarming
P.Miranda - swarming
P.Miranda – stygmergic space
Other multi-agent systems include such where there is no feedback amongst the agents. Such systems don’t take their fellow-agents into account when navigating the environment but act in isolation. (see Miranda above). This approach is of use when probing an environment via stochastics.
3.3 > ecologic feedback models
Termite algorithms can be seen to involve environmental parameters, both because of the direct feedback between material properties and the agent, but also in terms of external/global factors such as sun and wind. A more directly architectural example is that of Watanabe’s ‘Sun God City’ where agglomerations of apartments are generated randomly, but with rules such as ‘so many hours sunlight a day’ applied to delete/ promote individual cells. This method suggests a rich variety in external spaces providing new relations between function and space (openings, paths, terraces and common spaces), investigating conditions such as access and privacy.
Watanabe – Sun God City
Dutch architects Nox [17] used sound as a generator for their design proposal of a housing project ‘Off-the-road’ outside Eindhoven.
The profile of the noise barrier along the Autobahn has been transformed using animation software into a system of strings, 'playing' the noise of cars passing by. The vibration patterns have been recorded and added together to create a sound landscape. The resulting diagram represent/ maps the sound to be read in time (score) and in space (orchestra).
The form of the dwelling modules varies systematically following the wave patterns of the recorded traffic noise. The modulation of the noise patterns mirrors the variation of the volumes. Each housing unit is different reflecting the transformation of the neighbouring house. Hence, a global generator (sound) and a local geometric seed (initial housing layout) lead over time to morphology.
Nox – Off the
road
Cellular automata perturbed by environmental parameters have been experimented with by Coates and Voon [6]). In order to generate sheltered open spaces with a particular orientation, Voon encoded the general assumption that sunlight is perceived from the south – cells in the direction of the negative Y-axis where treated differently from others. Additionally, specific ‘voting rules’ for the transition between states were introduced to differentiate between above, below and next to in different directions, allowing the cell in question to sense overshadowing.
4 > a model for
cooperation of parallel systems
4.1 > elements of synthetic construction
In order to integrate the main aspects of the brief of the Europan07 competition, we extracted the dominant features of the above mentioned models to suit the different problems on site.
The parallel local transition rules of the CA serve to determine the distribution and designation of land-use on site. The CA will not directly be accounting for climatic change.
The topological freedom that the members of the swarm enjoy serves to establish the validity of local congruence with the climatic parameters. Thus, the strength of the swarm to detect idiosyncratic geometrical features of the site serves to perturb the structure of the CA locally. The swarm as a whole functions as a global observer who enforces the dynamics of the climatic parameters. The unhinging of a direct mapping of climatic change into the states of the CA’s cells helps to keep each system as simple as possible while trying to reflect on all possible parametric combinations of the search space. By applying this fragmentation of the various programmatic fields we are trying to avoid what Paul Valery observed: ‘if you examine the man-made object, you find that the form of the whole is less complex than the internal structure of the parts, and this suggests a disarrangement. In the sense, order imposes disorder.’[11]
The climatic constraints are limited to the sunposition during the day at different times of the year and the prevailing direction of wind.
Generally, we devised a fragmentation of the overall brief into programmatic sub-fields that could be handled by autonomous systems, which in turn would be coupled to another. One discontinuity occurs though, at the point when we zoomed into the human/ housing scale of the brief. As previously mentioned, a synergy of CA/ swarm/ ecologic parameters generates the morphology on a semi-urban scale (the cell size as discussed below corresponds to a minimal housing unit). After having established the macro scale for housing clusters, a separate program reads the clusters into a new CA and performs a ‘fractal decomposition’ on the clusters. The CA changes into a hybrid of semi-globally/ semi-locally steered model of simultaneous interactions and can thus not be described as a CA in the orthodox sense anymore. On the other hand, we attempted an integrity over scales by using related techniques that would still base themselves on the same geometrical elements as well as related local evaluation processes (as described below, there are two types of transition rules for CAs; on both, the semi-urban scale and the human/ housing scale the voting rule as been applied as transition functions).
Design
Brief Analysis


[semi-urban scale]

![]()
[land-use(CA)]
[synthesizer(swarm)] [ecology(climatic parameters)]
![]()
![]() [human/ housing scale]
[human/ housing scale]


[hybrid CA] [fractal decomposition]
4.2 > linking site and models – the semi-urban scale
4.2.1 > CA
To start with we divided the site into three layers of cubic cells, the size specified to serve in later stages as minimum housing units. Each cell would be read in by the program and filled into an array position of the CA. The site boundaries are also translated into cells that form the static edge cells of the CA. The edge cells contain the existing information of land-use around the site whereas the cells covering the site itself are set to a generic neutral state.
Two types of transition rules exist for CAs: the counting rule and the voting rule. The counting rule needs pre-established values from its neighbours in order to instruct the transition of the state of the cell whereas the voting rule established proportions between the states of the neighbours and instructs the transition of the cell in question according to a resulting gradient. For our model we used the voting rule for state transitions since each cell carries percentages of various land-uses. Thus, the state of a cell depends on the proportion of the various percentages summed up.
The smaller the cell the more accurate its occupational value can be determined and the CA’s gestalt on a global scale results more differentiated. Clearly, the size of cells generally relates to the overall size of the area of analysis in question and the statistical quality the cell should embody.
Four types land-uses have been identified for the gradients of the cell state:
- housing
- recreation (mainly outdoor activities)
- social infrastructure (kindergarten, shopping, etc)
- transportation (main roads)
Further a preferential matrix relates the types in an asymmetrical scheme to
another:
housing: + recreation
+ social infrastructure
- transportation
recreational: + housing
- transportation
social infrastructure: + transportation
transportation: + social infrastructure
- housing
During the evaluation phase of the CA, each cell sums up the total value of each land-use from all its neighbours and establishes the winning land-use. That final land-use will be the value the cell determines its state transition function upon. This transition is laid out in the above shown preferential matrix. If no preference is defined at all, the cell maintains its state.
Asymmetric preferences encourage emerging patterns of vicinity among occupation and reduce the amount of assumptions incorporated in the rules of the CA.

housing, social infrastructure,
transportation, recreation
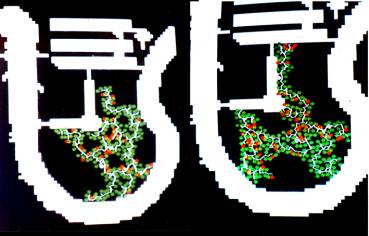
4.2.1 > swarm
The CA distributes locally information about land-use and sets up patterns of activity. However, it doesn’t include transition functions based on climatic parameters, so as not to complicate the communication processes of the cells among themselves. Hence, we introduced the swarm as an equally parallel system that is synchronous to the dynamic update mechanism of the CA. On the other hand, the members of the swarm are not limited by the isometric array of the automaton and possess the ability to perceive global height, distance and direction (as a result of implicit local perception due to their relation to the swarm as a whole). Thus, they are capable of testing locations on the surface of the CA for exposure to sunlight and the rate of enclosure (used for protection against heavy winds predominant on the Tromso site).
The added-on capacity (since it isn’t a basic quality of the simple swarm) is exploited to use the swarm members locally as fitness functions of the CA configuration. The swarm thus becomes a negotiator between the climatic global parameters and the local land-use preferential matrix of the cells.
Through the internal feedback of the swarm, idiosyncratic features of the site will be drawn out. Swarm members need to stay within ‘visual’ reach of their neighbours and average their direction of heading with these. Thus, if some members detect through deviant behaviour (i.e. ‘being trapped’ highlights difficulty of access or exit -> possible narrowness or enclosure of space) particular configurations in either morphology or neighbourhoods of cell states, these problematic configurations will be coupled with the climatic parameters more intensively, since the swarm would cluster its members in those locations [14]
4.2.2 > cooperative construction
To prompt a morphogenetic construction through the configuration of the CA, the ‘fitness’ tested by the swarm on the surface specifies what kind of transformation the swarm member will apply to the CA.
There is only one transformation the swarm member can exert which is the relocation of one cell of the CA. This transformation, or interaction with the automaton, is triggered by the occurrence of a combination of conditions on the surface:
If member situated on predominantly: housing cell
Then check for: shade condition
If member situated on predominantly: transportation cell
Then check for: wind condition
If member situated on predominantly: recreation cell
Then check for: shade & wind condition
If member situated on predominantly: social infrastruct. cell
Then check for: shade condition
If either of the conditions occur then the transformations will depend on the verification of a positive or negative outcome. Only if the outcome is negative (shaded or exposed to wind) will the agent perturb the automaton. In case of shading it will relocate the cell that is shading it to a new lower location within the cell’s three dimensional van Neumann neighbourhood. In case of exposure to wind, the member will ‘carve’ out a cell within its van Neumann neighbourhood and lift it to a new higher location. The shifted cell will carry its land-use percentages to its new location to preserve an informational balance within the automaton.
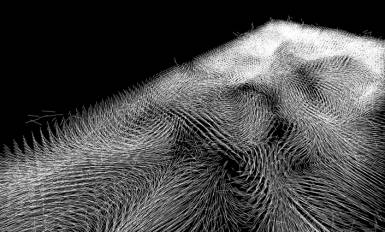
The aim of the shifting a cell downwards when in shade or upwards when exposed to wind, is the eventual emergence of an architectural configuration that will afford two key qualities of living in arctic landscapes
a) maximising the impact of sunlight when there is any during summer; also during winter, in complete absence of direct sunlight, a position is desirable which is surrounded by as many horizontal planes as possible because snow reflects light. Any light present in the context will be enforced by reflective surfaces. This observation allows us to test only months when sun is actually present since the same general (high) vertical positioning is aimed for.
b) minimising the impact of wind at any time. Cells will be shifted upwards since they will serve as wind shelters. If a irregular scattering of cells emerges, wind will be more successfully defended.
It is apparent that the swarm members are not directly communicating a coordinated sequence of spatial transformations but are prompted indirectly by the dynamic occurrence of a matter configuration combined with a climatic condition. Thus, the environment – here an architecture embedded in an ecology – becomes its own implicit indirect generator. As Theraulaz & Bonabeau reference Grasse: ‘… in the termites, the regulation of the batisseuse activity did not depend directly on the insects, but of constructions themselves: the insect does not direct its work but is guided by him. Thus, any batisseuse activity of a termite in a point of space, producing a new material structure, involves the creation of a new stimulative form, which can direct and start in return a new batisseuse activity among other members of the colony. This process, called ”stymergy” by Grasse, can lead to an almost perfect coordination of collective work,…’[8].
Thus, the automaton and the swarm are mutually embedded while they are both situated in a local ecology. They constitute structurally coupled systems while remaining topologically/ organisationally invariant (Maturana & Varela, 1984).
4.3 architecturalizing clusters
At a smaller architectural scale, we are hoping to create internal configurations within the housing clusters that accommodate some qualities generally associated with good standard living quarters. These include privacy, yet platforms for social interaction with neighbours, well-being through light spaces, which encourages sanitary living situations.
Further, the clusters generated in the first stage are not to be dismantled and extensively fragmented since clusters promote structural adjacency. In other words, the more walls between housing units are shared, the lower the heat loss of the cluster. The housing schemes erected over the last three decades were not respecting the local climatic conditions. One of those conditions is the extreme cold during winter, spring and autumn months. One approach to energy conserving sustainability is the subdivision of wall surfaces.
Once the configuration of a site lay-out has been synthesized by the first program, a second program reads the housing clusters in and limits its search space to one constraint:
- accessibility of each cell within the cluster
Since the clusters are made up of cells measuring minimal housing units (6*6*2.5 meters), a new iso-spatial array is populated with the solid cells. To achieve a reading and differentiation of accessibility of each cell in the array, we implemented two sequential processes that follow an initial investigation and establishment of which cells will serve as ‘generators’.
4.3.1 decomposing the cluster
To establish the generators, which will serve throughout as a kind of local observes and determine for the neighbouring cells what kind of decomposition they will have to apply to themselves, the cluster will wrap itself with a layer of static cells that read as the perimeter due to their states.
The cluster then performs an evaluation of each cell that will count-up its neighbours relative density and stores the value as its own state. This density each cell calculates depends on the vicinity to open spaces, be they internal or external. The cells with proportionally the highest density values will be emptied (remove the solid but keep density value) and serve its neighbours as observers and instructors – the generators. The initial density is calculated based on a van Neumann neighbourhood function.
Next, a looped sequential process begins.
The first step calculates the relative accessibility of each cell based on Moore’s neighbourhood function. Each cell’s density value will be graded according to the number of empty neighbours.
The second step passes through the generator cells. Each generator checks the relative density of its neighbours in the Moore neighbourhood. The neighbour with the lowest density value constitutes the cell with the highest probability to an open and potentially external space. The cells with the highest probability of external access will be exploded into its six faces. The face adjacent to the generator will be decomposed.
Those two steps will be repeated until each generator’s density value reaches a threshold. The threshold, a low value of density and therefore high probability of access for the neighbourhood, represents the halting function of the each generator independently.
If a cell has been decomposed more than three times it will become a generator itself and hence void.
The above described process forms a hybrid of a CA and the method of fractal decomposition. As in the CA a voting rule exists for each generator. The generators can only act locally and have no perception of the overall configuration of the cluster. Also, as in the CA both steps happen simultaneously. However, it is only the generators that are equipped with transition rules that they don’t apply to themselves but to one neighbour in each generation. Therefore, the cluster can not be described as a CA.
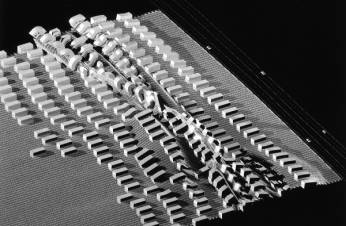
The decomposition process is vaguely related to a paper given by Coates, Appels, Simon and Derix at the GA2001 entitled ‘Dust, Plates and Blobs’[7].
 T. Appels –
fractal decomposition architecture
T. Appels –
fractal decomposition architecture
Appels generated architectural forms based on the formal position of the Belgian Theorist Van der Laan, using fractal decomposition. It has to be pointed out, that the decomposition process of the present work is not recursive yet creates self-similar resulting configurations.
Apart from finding physical access to the cells and providing internal open spaces, this process entails qualities such private and public places within the clusters and allows for a hierarchy between them. It also generates interesting and varying light conditions inside the decomposed cluster. Thus, through interpretation of the emergent configurations we are able to compose living-space patterns of new typology, which on the other hand reflect the climatic and social conditions of the location (and the design brief).
5 > conclusion
The present work is in progress. The programs for either architectural scale are already in their final stages. Hence, we had the opportunity to test the first versions on generic sites.
One of the main intentions of the project is the incorporation of generative and evolutionary processes into the context of an industry’s design brief without remaining at a very large and general scale. We are not necessarily interested in producing completely new tools or theories here but to check the validity of bottom-up design approaches to architectural and urban design. Clearly, the full range of constraints of the competition brief has not been applied and we are not under the illusion that every detail of a housing scheme could be resolved on the basis of generative processes.
The designer as in most generative design approach sets out the algorithms which the processes are based on. He needs to carefully determine which constraints are placed on the processes and of course which process is used. Finally, he slips back into the role of the observer and chooses which outcome to develop further. He therefore interacts with the processes and becomes part of the algorithm her/ himself.
As a first stab at working with a competition deadline, we had to find out how difficult the tuning between machine/ human processes is. It is very tempting to stop the machine when a result looks fabulous but the process hasn’t finished yet, meaning the constraints have not been met. Only when the processes based on the fitness according to constraints come to a halt will the result be verifiable within the design brief… additionally checked by the observer’s aesthetic perception.
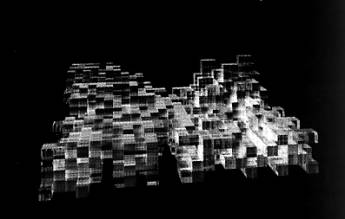
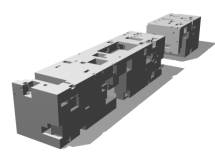
Overall, emergent typological and topological configurations appear through the use of synergetic digital design, using the CA as a basis for morphological construction. In that sense a partial success. It remains to test the emergent typologies against the brief and to analyze the use and qualities of these generated spaces.
housing/ human scale hybrid CA initial test
7 > References
- Prof Alan Feldt, ‘Community Land Use Game’, New York, Free Press, 1972
- Hillier & Leaman, ‘Space Syntax’ in Environment And Planning B 3, 1978
- Steadman & March, ‘Geometry of Environment, RIBA Press’, 1971
- Cecchini & Rinaldi, ‘Building Urban Models With Multi-CA’, 1998
- Haken & Graham, 'Synergetics - The theory of Cooperation', Umschau 6 (eds), 1971
- Coates, Healy, Lamb, Voon, ‘The Use of Cellular Automata to Explore Bottom-Up Architectonic rules’, Eurographics 14th Annual Conference, 1996
- Coates, Appels, Derix, Simon, ‘Dust, Plates & Blobs’, GA2001, Milan, 2001
- Theraulaz & Bonabeau, ‘Coordination in distributed building’, Science 269, 1995
- Bonabeau, Dorigo & Theaulaz, ‘Swarm Intelligence’, Oxford University Press, New York, 1999
- Watanabe, ‘Induction Design – A Method for Evolutionary Design’, Birkhaeuser, Basel, 2002
- Paul Valery, ‘Reflections on Art’ from Aesthetics vol. 13, New York, Pantheon, 1964
- Maturana & Varela, ‘The Tree of Knowledge’, Goldmann, Munich, 1987
- Coates & Schmid ‘Agent based Modelling’ ECADDE 1999 Liverpool
- Carratza & Coates The use of swarm intelligence to produce architectural form’ GA 2000 Milan 2000
- Coates & Thum ‘Parallel systems
and architectural form’ Greenwich ‘Digital design studio conference’
Greenwich 2000
- Nox Architecture ‘Off the road’ Arch+ 47 pp 78,79