Net Work: Lessons from
collaboratively designing an interactive artwork
Dr Jon Bird, PhD
Centre for
Computational Neuroscience and Robotics, University of Sussex, UK
Prof. Mark d’Inverno, PhD
Department
of Computing, Goldsmiths College, University of London, UK
Jane Prophet
Independent Artist, London, UK
Abstract
For the last 18 months we have been involved in designing and building
the software and hardware for a prototype floating interactive artwork, Net
Work, that is constructed from autonomous light-emitting buoys that respond to
their physical environment and the state of neighbouring buoys. The completed
artwork will be installed at a London location (such as the dockside basin
adjacent to Wapping Art) and in further venues across the UK (potentially next
to the pier in Herne Bay).
The design process has involved the collaboration of artists, designers,
programmers and engineers. Although Jane Prophet had an artistic vision of the
project, initially there were no clearly defined collective goals or individual
roles. Consequently, the project has not employed a traditional engineering
problem-solving methodology. The project’s goals, and the means of achieving
them, have developed through an open-ended process that has benefited from the
contributions of different collaborators. In this paper we describe some
lessons we have learnt from using an interdisciplinary, collaborative approach
to build the prototype of Net Work. It is our belief that this approach could
be productively applied a large class of design problems where there is no
clear, well-defined goal.
1. What is Net
Work?
Net Work will be a large scale interactive art installation constructed
from 100 autonomous light emitting buoys placed at 1 meter intervals to form a
10×10 grid. The buoys display colours that correspond to their behavioural
state, which depends on both the environment (wave motion and light levels) and
the state of neighbouring buoys. The artwork will be installed at a London
location (such as the dockside basin adjacent to Wapping Art) and in further
venues across the UK (potentially next to the pier in Herne Bay – Figure 1).
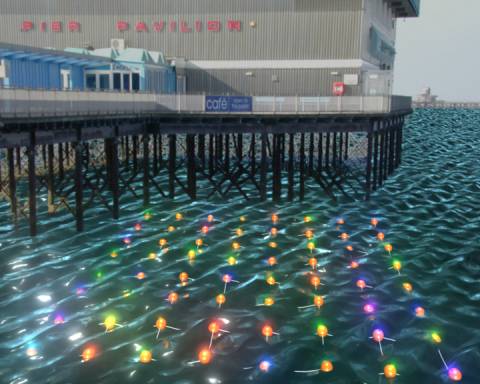
Figure 1: a
visualization of Net Work adjacent to Herne Bay pier, UK
Net Work will respond to two types of user interaction: one where the
audience is physically proximate; and the second, where a remote audience can
affect the installation over the Internet. The local audience can shine
torchlight on the buoys, activating their light sensors and thereby changing
their state and corresponding colour. For the online audience we will provide software for participants to
design their own buoy interaction rules, run them in simulation and see a
visualization of the behaviour of the installation. We will save these online
designs so they can be downloaded onto Net Work and drive the physical artwork.
2. Building an
interactive artwork as a case study for interdisciplinary collaboration
There are two key reasons why building an interactive artwork is a good
case study for interdisciplinary collaboration. First, the skills required are
often beyond the expertise of one person. There are many pragmatic and
aesthetic challenges involved in building an interactive artwork that can only
be solved with a wide range of specialist knowledge. The Net Work project has benefited
from experts in the fields of: art; design; engineering; software development;
and biological sciences. Second, designing and building a large scale outdoor
interactive artwork is not a well-defined problem.
There are many unknowns involved in building physical artefacts that need to respond to the environment. In
our case the artwork will be situated in a particularly challenging physical
environment where it has to float, be autonomous with respect to energy and to
keep its structural integrity while coping with all kinds of weather and waves.
Just how long the buoys can survive in water is currently an open issue. As Net Work is a public artwork we also have
to consider maintenance issues such as how to cope with vandalism.
Furthermore, it may be that an open-ended approach is the only viable
option when trying to design systems with even minimal agency; that is, where
system components autonomously interact with and respond to the environment in
which they are situated. This is because it is often not possible to define in
advance all the significant parameters of interactive systems and the
environments in which they are operating. Consequently it is hard to predict
the behaviour that will result from system-environment interactions. Penny [1, p.416]
describes the advantages of an artistic training for building autonomous,
interactive systems where the focus is on what he calls ‘interactive esthetics’
rather than implementing an “externally specified task for the system”; that
is, the type of problem that requires an open-ended approach. He argues that an
artist is “able to experiment without the constraint of total reliability or a
pragmatic work-oriented goal” and consequently they can “open up a wide field
of possibilities, some of [which] may ultimately have application or relevance
in pragmatic applications” (pp.420-421).
3. How have we
designed Net Work?
In 2005, d’Inverno and Prophet set up an Interdisciplinary Research
Cluster (IRC) funded by the EPSRC and AHRC entitled: ‘Designing physical
artefacts from computational simulations and building computational simulations
of physical systems’ (www.interdisciplinary.co.uk). The major aim of this
project was to form a new research community centred on simulation and digital
art and design. Specifically, the IRC explores how interdisciplinary
collaboration can lead to new forms of design suitable for the challenges of
the 21st century.
3.1 IRC
methodology
Even though there was some notion of the kinds of issues we wanted to
explore in the IRC, we had no strict plans or schedules that specified how we
should go about our activity. Initially, after setting up a newsgroup and
website, and putting out various calls to join our community, there was very
little online discussion. We organised several meetings of a very mixed set of
people (including artists, designers, computer scientists and engineers) and
decided that in order to explore the issues of collaboration in design it would
be best to actually build a physical artefact that had computational and
generative elements. Ten projects were proposed and investigated over a two-day
workshop. Towards the end of the workshop a vote was taken and the group
decided to make a prototype of Net Work, Jane Prophet’s proposed interactive
installation. Because members of our group felt a sense of ownership, not only
of the goal to collectively build a physical artefact, but also of the design
process, the traffic on the newsgroup increased significantly. Many members of
the cluster gave their time freely to debate the best way to build the Net Work
prototype. The advantage of having a large number of collaborators, with a
broad range of artistic, computing and engineering skills, was evidenced by the
large number of potential solutions offered to software and engineering
problems, the subsequent high level debate, and the speed at which the research
cluster solved many of the challenges associated with building Net Work. The
collaborative process led Prophet to further develop and clarify her core idea
and the project evolved as collaborators introduced and argued for new
elements.

Figure 2: the
3 x 3 buoy Net Work prototype
3.2 The next
phase
Having built a 3x3 buoy prototype (Figure 2), there are still several
engineering challenges to be solved before the artwork can be displayed for
long periods of time. We expect the hardware design will evolve further through
collaboration and experimentation.
In the next phase of the project we are also focusing on two other
outstanding challenges. First, how we can get a local and remote audience (via
the internet) to engage with the artwork? Second, how can the artwork provide
the public with insights into self-organizing systems? Specifically, how can
Net Work demonstrate to the public that the interaction of simple elements can
lead to more complex global behaviour. The generative software in Net Work is
inspired by team members’ research into modelling biological systems,
particularly stem cell behaviour [2][3]. A key goal is to make the ‘invisible’
behaviour of stem cells visible for the public. In the next section we describe
our initial approach to these challenges.
4. Giving the
public insights into self-organizing systems
One of the general aims of the IRC
was to investigate the relationship between the physical and
computational worlds. We plan to use questionnaires and explore other feedback
methods to evaluate how audiences engage with Net Work. We would like to
investigate the following questions: How do we perceive and relate to
computational processes embedded in the physical world? Are there clear differences between the way
that artists, scientists and the public engage with interactive systems such as
Net Work? Can we make the invisible interactions of cells in the human body
visible in an artwork? How can we best demonstrate to audiences that simple
rules can lead to complex behaviour?
Models of stem cell behaviour
published in the literature (including our own) are often based on very
simple rules specifying cell-cell interaction and how cells react to
environmental changes [4]. Descriptions of these simple rules were posted on
the cluster’s web site and Jon Bird, one of the cluster’s original members,
proposed using a very simple homeostat model to drive the activity of the
autonomous buoys. The paper gives an overview of this model in the next
section, but for full technical details please refer to [5].
5. Ashby’s
Homeostat Model
Ashby defined
an ultrastable system as one that is able to reconfigure plastically in
response to any of its essential variables going outside their stable bounds
and thereby return the variable to an acceptable level. A biological example is
the way that animals keep their body temperatures relatively constant. Ashby
argued that in order for ultrastable mechanisms to adapt in this way they
necessarily consist of both a primary feedback between the sensorimotor system
and the environment and a secondary, intermittent feedback between the
essential variables and the sensorimotor system. The secondary feedback
reconfigures the primary feedback connections when the systems essential
variables go outside of given limits.
Ashby built the homeostat in order to empirically demonstrate his
theoretical arguments about ultrastable mechanisms. The homeostat (Figure 3) is
comprised of four units, each of which consists of a
magnet, electronic circuitry and other physical components. The magnetic field
drives the position of a needle on top of the unit that is free to move in an
approximately 180 degree arc. The needles’ positions
represent the essential variables of the system that are to be kept within
bounds, which are defined as 45 degrees either side of a central
point at the front of each unit. All four units are connected to each other
electrically and the torque on each magnet is proportional to the sum of the
three input currents from the neighbouring units and a single recurrent
connection. The current that a unit sends to its neighbours, and feeds back to
itself, is proportional to the deviation of its needle from the central position.
No current is passed if the needle is positioned within the stable region and
larger currents are passed as the deviation from this region increases.

Figure 3: Ashby’s four unit homeostat.
Each of the units can be arbitrarily conceptualised as representing the
environment or sensorimotor system of an ultrastable mechanism and the
electrical interactions between the units therefore model the primary feedback.
When a needle deviates outside of its stable bounds, a secondary feedback
mechanism is triggered that randomly changes a number of parameters that affect
the movement of the magnet. The magnet in each unit is driven by the activity
of four coils, each of which is dependent on the settings of
an associated commutator and potentiometer. Three of the coils are connected to
one of the input connections from a neighbouring unit and the other coil is
connected to the recurrent connection. The polarity of each input, including
the self-connection, is determined by the state of the commutator and the
proportion of each input signal reaching its associated coil is determined by
the state of the potentiometer. The secondary feedback is implemented by
connecting a uniselector to each unit. This device has 25 discrete
states, each of which consists of a triple of random values, derived from a
standard statistical table. This can be thought of as a look up table with 25 rows and 3 columns which provides random
numbers to reconfigure the system; in contemporary digital systems a
pseudo-random number generator plays a similar functional role. Each of these
random values controls the operation of one of the commutator/potentiometer
pairs and thereby determines the weighting and polarity of an input connection
from a neighbouring unit. There are 254 (390,625) different
combinations of uniselector parameter values that a four unit homeostat can
randomly explore in order to find a combination that leads to all of the units
displaying stable behaviour. When each potentiometer/commutator pair is
assigned a new random parameter value, the polarity and amplitude of the
associated input current are changed. This affects the movement of a unit’s
needle and in turn, through its electrical connections, the movement of the
needles in the other units of the homeostat. Through this simple, random
mechanism the homeostat behaves as
though it were seeking to keep its needles in central positions in a
goal oriented fashion.
Ashby tested the homeostat by first allowing it to stabilise and then
taking control of one of the units and reversing the commutator by hand,
thereby causing an instability. He then observed how the system adapted its
configuration until it found a stable state once more. He argued that the
homeostat displayed, “in elementary form, the power of self-organisation” that
was analogous to the action of the nervous system: “first the established
reaction, then an alteration made in the environment by the experimenter, and
finally a reorganisation within the nervous system, compensating for the
experimental alteration” [6, p.107].
Recently, there has been a renewed interest in the homeostat and there
have been several different applications of ultrastable architectures by
Artificial Life researchers. Eldridge [7] implemented neural network
simulations of the homeostat and used them as a component in number of
generative music systems[1].
5.1 The Homeostat Model in Net Work
The homeostat simulation used to drive the Net Work prototype was based
on Eldridge’s [7] neural network C code, although different parameter values
were used. It was re-implemented in Java in the Processing environment
(http://processing.org). The user interface was built using John Beech’s MyGUI
library. The source code and interactive demonstrations of the homeostat model
used in Net Work project are online at:
www.cogs.susx.ac.uk/users/jonba/homeostat/instructions.htm.
5.2
Visualizing the Homeostat Activation Dynamics
In the homeostat simulation of Net Work each buoy is represented by a
neural network unit. In order to visualize the dynamics of the network the
activation of each unit is mapped to a hue value (using the HSB colour model).
The hue representing the stable activity was empirically determined so that
changes in the activation could be clearly visualized. For example, shifting
the stable hue to either the green or red regions of the HSB colour space makes
it more difficult to visualize small changes in activity. Currently only the
hue of the units is used to visualize changes in activation and saturation and
brightness stay constant at 0.
Each unit is connected to its four nearest neighbours (positioned N, E, S
and W). The number of connections was restricted in order to minimise the time
it takes the network to stabilize. The sign of the weights (range [-1.0, 1.0])
represents the action of the commutator and the strength the action of the
potentiometer in Ashby’s original homeostat. If a unit’s activity goes outside
of its stable bounds (defined as [-0.1,0.1]),
then the sign and strength of its four connections to its nearest
neighbours (but not its recurrent connection) are randomly changed by setting
each connection to a different random value in the range [-1.0, 1.0]. The maximum change in activity of a unit in a
single time step is initially set to +/- 0.01, but this value can be changed by
a user. Each time the homeostatic network is updated a small noise value is
added to the activation of each of the units. Initially, the activation of each
of the units is set to a random value in the range [-0.03, 0.03].
In the next phase of Net Work the simulation will be
developed in a number of ways: the environment model, in particular wave
dynamics, will enhanced; we will explore how saturation and brightness can
enhance the visualization; and other algorithms, based on cellular automata,
will be implemented in order to explore the best way of providing the public
insights into self-organization.
6. Lessons learnt
Many challenges facing the 21st century clearly need experts from very
different disciplines to work together. However, building and sustaining teams
is difficult because these disciplines and their underlying cultures are so
different: we lack a shared language and common methodology for interdisciplinary,
collaborative research. Furthermore, tangible outcomes are seldom guaranteed
when trying to solve open-ended problems. In order to achieve our second phase
goals, we have applied for a research grant. This application process required
us to describe how the project will be managed using a standard hierarchical
structure where there is a clear allocation of responsibilities. This
management framework does not facilitate the type of open-ended collaboration
that we argue is crucial to the success of the project. In future there will
need to be funding streams that allow for much more process-based investigation
where the goals and outcomes develop during the project.
Designing the prototype of Net Work has shown us the benefits of
interdisciplinary collaboration. We have learnt two lessons on how art, design,
science and technology can collaborate so that innovation emerges. First,
there has to be an element of trust and empathy between people working together
as interdisciplinary, collaborative teams. Second, a sense of ownership of the
process and the product for all contributors is essential: without this the
relationship between contributors changes from collaboration to employment.
We need
mechanisms for testing and evaluating methods for building interdisciplinary
teams. We think it would be useful to have a trained observer, such as a social
anthropologist, as part of a collaborative team in order to observe how the
process of interaction actually takes place. This paper is a first step in documenting collaborative,
interdisciplinary activity and we aim to develope a framework for conducting
this sort of research. We would like to
hear from others who are engaged in similar projects.
Acknowledgements
We would like to thank all members
of the IRC that were involved in the development of the Net Work Prototype
especially Michael Bacon, Adrian Bowyer, Trevor Graham, Paul Hammond, Jon
McCormack, Luke Nicholson, Fredrik Olofsson, Ben Pirt, Rob Saunders, Neil
Theise and all members of the interdisciplinary research cluster.
References
[1] S. Penny. Agents as artworks and agent
design as artistic practice. In Kirstin Dautenhahn, editor, Human Cognition and
Social Agent Technology, pages 395 – 414. John Benjamins, Amsterdam, 2000.
[2]
M. d’Inverno, N. D. Theise, and J. Prophet. Mathematical modelling of
stem cells: a complexity primer for the stem cell biologist. In Christopher
Potten, Jim Watson, Robert Clarke, and Andrew Renehan, editors, Tissue Stem
Cells: Biology and Applications, pages 1–47. Marcel Dekker, 2006.
[3] M. d’Inverno and M. Luck. Understanding
Agent Systems (Second Edition). Springer, 2004.
[4] S. Kamel-Reid, M. Freedman, and H.
Messner. Early hematopoietic reconstitution after clinical stem cell
transplantation: evidence for stochastic stem cell behavior and limited
acceleration in telomere loss. Blood, 99:2837–96, 2003.
[5]
J. Bird, M. d’Inverno and J. Prophet. Net Work: An Interactive Artwork Designed Using an Interdisciplinary
Collaborative Approach, Special Issue on Computational Models of
Creativity in the Arts, Digital
Creativity, to appear 2007.
[6] W. R. Ashby. Design for a Brain: The
Origin of Adaptive Behaviour. Chapman and Hall, London, second edition, 1960.
[7] A. Eldridge. Adaptive systems music: Algorithmic process as a compositional tool.
Technical Report EAsy MSc Thesis, University of Sussex, 2002.